五少年科技發(fā)布首款定向音頻智能眼鏡,開(kāi)啟個(gè)人音頻空間新紀(jì)元

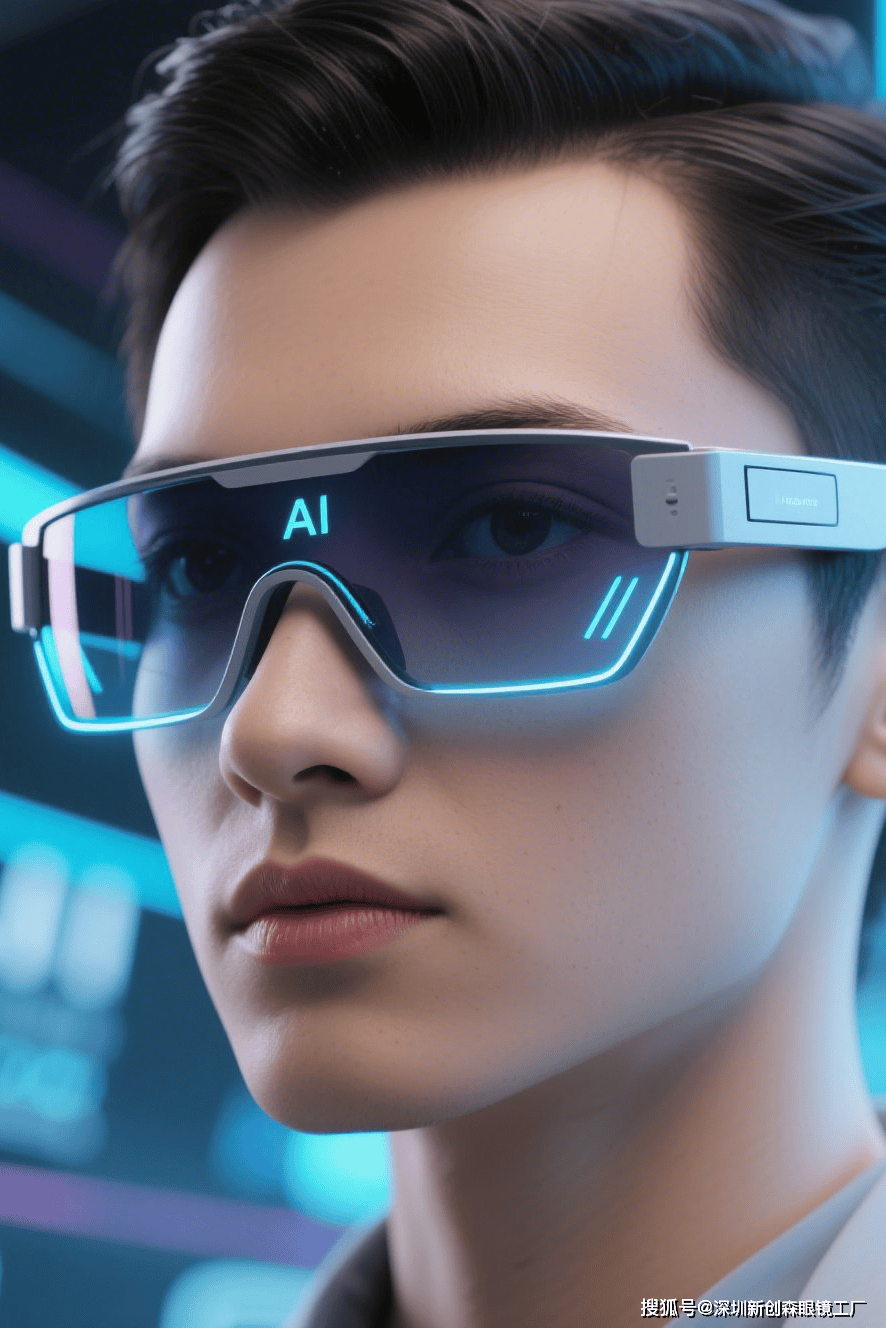
由創(chuàng)新科技團(tuán)隊(duì)“FiveBoy”傾力打造的首款定向音頻智能眼鏡正式發(fā)布,標(biāo)志著智能可穿戴設(shè)備領(lǐng)域迎來(lái)了一位兼具前沿科技與實(shí)用美學(xué)的全新成員。這款產(chǎn)品不僅繼承了智能眼鏡在信息顯示、健康監(jiān)測(cè)等方面的傳統(tǒng)優(yōu)勢(shì),更憑借其獨(dú)特的定向音頻技術(shù),為用戶創(chuàng)造了一個(gè)前所未有的“個(gè)人音頻空間”,在喧囂的都市生活中開(kāi)辟出一片私密、清晰的聽(tīng)覺(jué)綠洲。
核心技術(shù):定向聲場(chǎng),私密聆聽(tīng)
該款智能眼鏡最大的亮點(diǎn)在于其集成的尖端定向音頻技術(shù)。通過(guò)精密的聲學(xué)設(shè)計(jì)和微型揚(yáng)聲器陣列,眼鏡能夠?qū)⒙曇舾叨染劢梗纬梢坏廓M窄的聲束,如同手電筒的光束一般,精準(zhǔn)地傳遞到用戶的耳中。這意味著,只有佩戴者本人能清晰聽(tīng)到眼鏡播放的音樂(lè)、導(dǎo)航提示或通話內(nèi)容,而身旁的他人幾乎無(wú)法察覺(jué),有效避免了傳統(tǒng)耳機(jī)或揚(yáng)聲器公放帶來(lái)的隱私泄露和聲音干擾問(wèn)題。無(wú)論是在擁擠的地鐵、安靜的辦公室,還是在需要保持環(huán)境感知的戶外場(chǎng)景,用戶都能享受完全屬于自己的音頻世界。
智能體驗(yàn):無(wú)縫互聯(lián),便捷交互
作為一款“智能”眼鏡,其功能遠(yuǎn)不止于音頻。它內(nèi)置了高性能處理器與低功耗連接模塊,能夠與智能手機(jī)等設(shè)備無(wú)縫互聯(lián)。用戶可以通過(guò)輕觸鏡腿的觸控區(qū)或語(yǔ)音指令,輕松接聽(tīng)電話、喚醒語(yǔ)音助手、控制音樂(lè)播放、獲取實(shí)時(shí)導(dǎo)航信息。部分型號(hào)還集成了微型攝像頭和傳感器,支持第一視角的快捷拍照、錄像及簡(jiǎn)單的AR(增強(qiáng)現(xiàn)實(shí))信息疊加體驗(yàn),讓科技自然地融入日常視野。
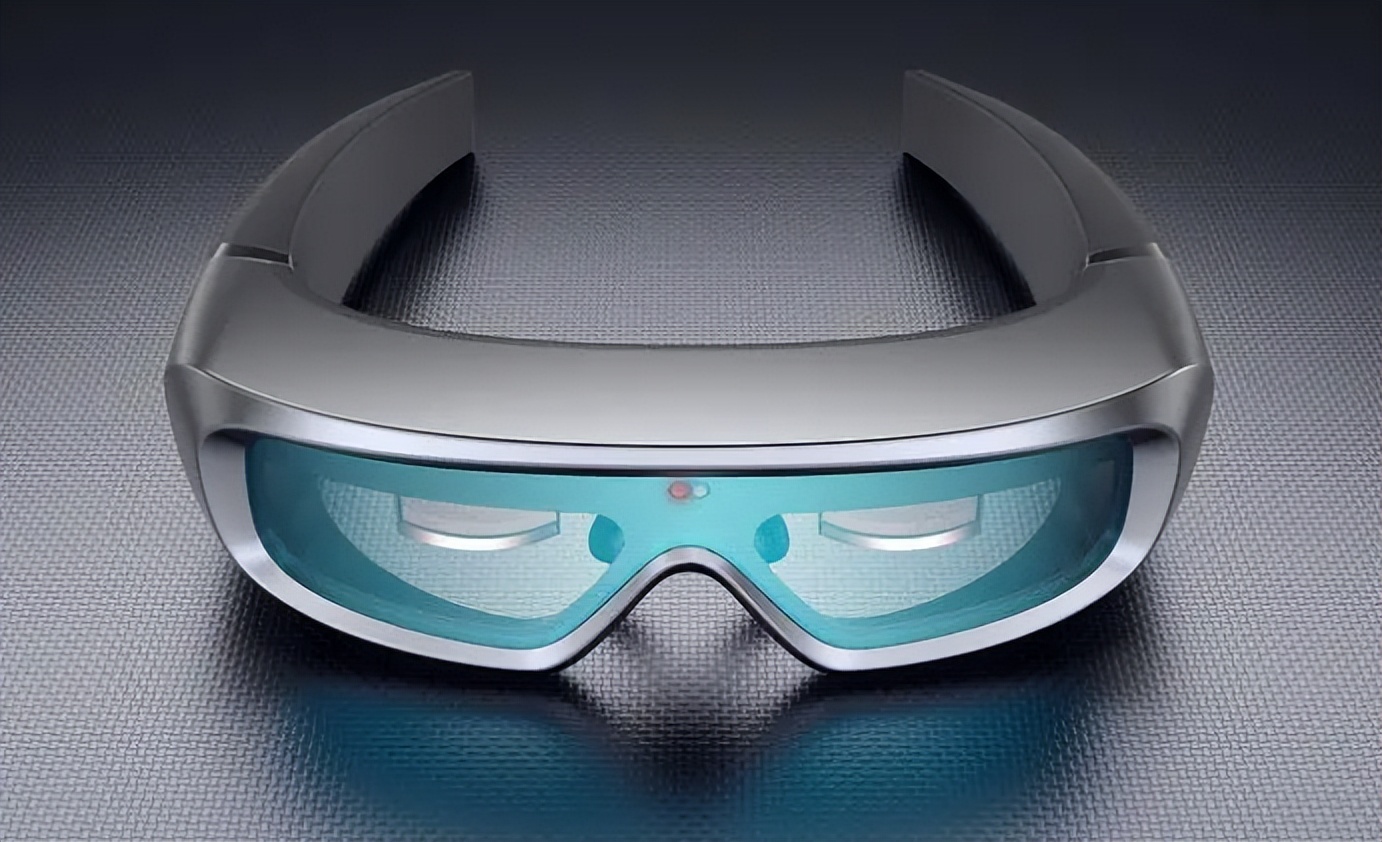
設(shè)計(jì)美學(xué):輕盈時(shí)尚,持久續(xù)航
FiveBoy團(tuán)隊(duì)深知,一款成功的可穿戴設(shè)備必須在科技與設(shè)計(jì)之間取得完美平衡。該智能眼鏡采用了輕量化材質(zhì)和符合人體工學(xué)的鏡架設(shè)計(jì),佩戴舒適,長(zhǎng)時(shí)間使用也無(wú)壓迫感。外觀設(shè)計(jì)簡(jiǎn)約時(shí)尚,提供了多種鏡框款式和鏡片選項(xiàng)(包括平光鏡與定制度數(shù)鏡片),滿足不同用戶的審美與視力需求。在續(xù)航方面,眼鏡通過(guò)優(yōu)化電路設(shè)計(jì)和搭載高能量密度電池,實(shí)現(xiàn)了全天候的續(xù)航能力,并支持快速充電,確保科技體驗(yàn)不中斷。
應(yīng)用場(chǎng)景:從生活到工作的全方位覆蓋
這款定向音頻智能眼鏡的應(yīng)用場(chǎng)景極為廣泛:
- 通勤與運(yùn)動(dòng):在路途中享受音樂(lè)、播客,同時(shí)保持對(duì)周圍環(huán)境聲音(如車輛鳴笛)的警覺(jué),提升安全性。
- 辦公會(huì)議:在不打擾同事的情況下,私密接收手機(jī)通知或進(jìn)行簡(jiǎn)短語(yǔ)音通話,提升工作效率。
- 內(nèi)容創(chuàng)作:視頻創(chuàng)作者可以將其作為無(wú)線麥克風(fēng)與監(jiān)聽(tīng)耳機(jī)的一體化替代方案,進(jìn)行更靈活的拍攝。
- 無(wú)障礙輔助:為聽(tīng)障人士提供聲音信息的視覺(jué)化提示或增強(qiáng)特定方向的聲源,展現(xiàn)了科技的人文關(guān)懷。
與展望
FiveBoy出品的這款首款定向音頻智能眼鏡,并非簡(jiǎn)單地將耳機(jī)功能附加在眼鏡上,而是通過(guò)創(chuàng)新的音頻技術(shù),重新定義了個(gè)人音頻的接收方式,在開(kāi)放性與私密性之間找到了一個(gè)巧妙的平衡點(diǎn)。它的發(fā)布,不僅是智能眼鏡賽道的一次重要?jiǎng)?chuàng)新,也為未來(lái)可穿戴設(shè)備如何更自然、更無(wú)感、更體貼地融入人類生活提供了新的思路。隨著技術(shù)的迭代和生態(tài)的完善,智能眼鏡有望從新興的科技產(chǎn)品,轉(zhuǎn)變?yōu)槊總€(gè)人日常生活中不可或缺的智能伴侶。
如若轉(zhuǎn)載,請(qǐng)注明出處:http://www.jyf1008.cn/product/8.html
更新時(shí)間:2026-06-19 04:38:09